Thuis
>
Producten > Laserafstandsmetermodule > 905nm laserafstandsmetermodule > Laserafstandsmetermodule 120m 4Khz





Laserafstandsmetermodule 120m 4Khz
STA-MK400 hoogwaardige laserbereikmodule is een laserbereiksensor gebaseerd op Time-of-Flight (TOF) -technologie. Het beschikt over een ingebouwde controller en een bereikalgoritme, met een bereikfrequentie tot 4 kHz en een bereik tot 120 meter. Het ondersteunt uitgangscommunicatie op UART-niveau en beschikt over sterke anti-interferentiemogelijkheden, waardoor een stabiele werking wordt gegarandeerd, zelfs in zonlicht.
Stuur onderzoek
Productomschrijving
De MK400 beschikt over een hoge nauwkeurigheid, een compact formaat en een laag gewicht. Het is zeer geschikt voor kleine dronesystemen zoals het vasthouden van hoogte, het vermijden van obstakels en cruisen, maar ook voor systeemintegratie in autonome voertuigen.
| Basisparameters van de module | ||
| Model | STA-MK400 | |
| Variërende nauwkeurigheid | ±0,1m | |
| Modulegrootte | ≤32*19*16mm | |
| bereik vermogen | Typisch doelwit | ≥300m, doelreflectie 90% |
| Bouwonderzoek | ≥120m | |
| Meet het natuurlijke doelwit | ≥80m | |
| Recent bereik | 0,1 m | |
| Bereik frequentie | 4 KHz | |
| Resolutieverhouding | ±0,1m | |
| Werkende stroom | ≤200mA | |
| Stand-by stroom | ≤33mA | |
| Stroomverbruik in stand-by | ≤0,2W | |
| Stroomverbruik | ≤0,6W | |
| CI | TTL | |
| Werktemperatuur | -10℃~+55℃ | |
| Opslagtemperatuur | -20℃~+65℃ | |
| Ingangsspanning | 5V | |
| Lasergolflengte | 905 nm | |
| Straaldivergentiehoek | 8 mrad | |
| Stroom | ≤ 1 mW veilig voor het menselijk oog | |
| Methode voor het vinden van bereik | impuls | |
| Gewicht | 7,7 ± 0,2 g | |
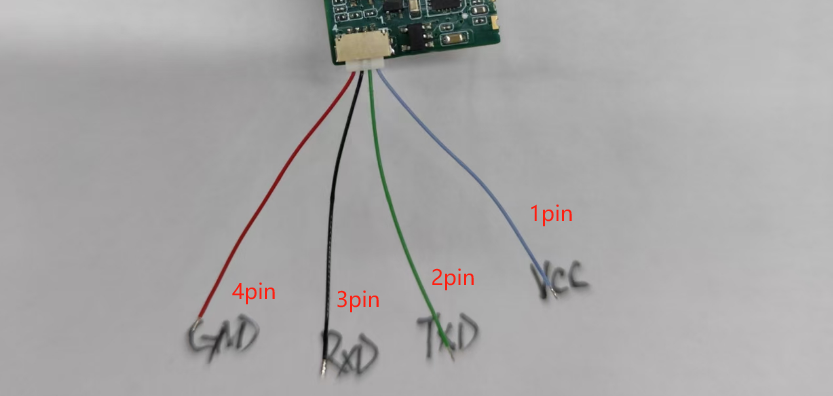
| De pinconfiguratie van de STA-MK400 module wordt geïllustreerd in het onderstaande schema. | |||||
|
|||||
| Pinnummer | functionele beschrijving | ||||
| 1 | VCC | ||||
| 2 | TXD | ||||
| 3 | RXD | ||||
| 4 | GND | ||||
| Giet: 1. De communicatie-interface van deze module is TTL. 2.UART-configuratie: 1 startbit, 8 databits, 1 stopbit, geen pariteitscontrole; | |||||
| DC-EIGENSCHAPPEN | |||||
| parameter | testconditie | minste waarde | topwaarde | eenheid | |
| Bedrijfsspanning (Vin) | T=25°C | 2.5 | 5.0 | V | |
| werkstroom (I) | stand-by (T=25°C, Vin=3,0V) | - | 50.0 | mA | |
| bereikbepalingsconditie (T=25°C, Vin=3,0V) | - | 180.0 | mA | ||
communicerend protocol
| Tabel 1-1: Formaat van het instructieframe van de hostcomputer | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 … (N - 1) | N | |
| betekenis | framekop | module-adres | DL | commando en parameter | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | LEN |
|
|
|
| Opmerking 1: Datalengte verwijst naar het aantal bytes van byte 3 tot N, waarbij LEN = N-2. | |||||||
| Opmerking 2: Wanneer de hostcomputer gegevens verzendt, omvat de CheckSum-berekening het optellen van alle gegevens (exclusief de frameheader) in bytes en het nemen van de onderste 8 bits, waarna dit wordt berekend. Het 8-bits binaire complement is de CheckSum; voorbeeld: De hostcomputer verzendt een continu bereikcommando (0x13) met moduleadres 01 en een gegevensveld van 3 bytes. De CheckSum wordt als volgt berekend: De som van 0x01,0x03 en 0x13 is gelijk aan 0x17, waarbij de minst significante bit (LSB) 0x17 is. Het twee-complement van 0x17 is 0xE9. Dus CheckSum = 0xE9. Het feitelijke dataframe dat door de hostcomputer wordt verzonden, is: A5 5A 01 03 13 E9 | |||||||
|
|
|
|
|
|
|
|
|
| Tabel 1-2: Formaat van het module-uitvoerframe | |||||||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 … (N - 1) | N | |
| betekenis | framekop | module-adres | gegevensbeschrijving | gegevensveld | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | (zie opmerking 1) |
|
|
|
| Opmerking 1: Beschrijving van de gegevensbeschrijving:D[7:6]:00: De volgende gegevens vertegenwoordigen afstandsmetingen. Een afstandswaarde van 0 geeft aan dat er geen afstand is gedetecteerd. 01: De daaropvolgende gegevens bevatten aanvullende informatie, met details in tabel 1-3. 10,11: FabrieksreserveerdD[5:0]: Datalengte (zie opmerking 1 in tabel 1); | |||||||
| Opmerking 2: Wanneer de hostcomputer de gegevens ontvangt, berekent deze de CheckSum door alle gegevens van het moduleadres naar de CheckSum op te tellen in bytes.Sum en de laatste 8 bits. Voorbeeld: De module verzendt de afstandsgegevens 0x0B4A met adres 01. De hostcomputer ontvangt het gegevensframe: A5 5A 01 03 0B 4A A7Verificatie: De som van 0x01,0x03,0x0B,0x4A en 0xA7 is gelijk aan 100, waarbij de minst significante bit (LSB) van de som 00 is, wat aangeeft dat er geen fout is. | |||||||
|
|
|
|
|
|
|
|
|
| Tabel 1-3 Overige antwoordinformatie | |||||||
| Byte 4 | Byte 5 | Byte 6 | Byte 7 | Byte 8 | uitleggen | ||
| 06 | Controlesom | niet hebben | niet hebben | niet hebben | Simpel antwoord | ||
| E0 | foutcode | Controlesom | niet hebben | niet hebben | foutmeldingsframe | ||
| E1 | verkeerd markeren | Controlesom | niet hebben | niet hebben | Fout bij zelftest bij opstarten | ||
| A1 | Baudsnelheid | Controlesom | niet hebben | niet hebben | Reactie op verandering van de baudsnelheid | ||
| A3 | module-adres | Controlesom | niet hebben | niet hebben | Reactie bij het lezen of wijzigen van het moduleadres | ||
| AF | Softwareversie | Productversienummer | Controlesom | Reactie bij het lezen van softwareversienummer | |||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
| Opmerking 1: Voorbeeld van softwareversienummer (subversie van 2 cijfers): Voorbeeld 1: Wanneer het softwareversienummer 0x0064 is (equivalent aan 100 in decimalen), is het versienummer V1.00. Voorbeeld 2: Wanneer het softwareversienummer 0x03F2 is (equivalent aan 1010 in decimalen), is het versienummer V10.10. Voorbeeld van productversienummer (subversie van 1 cijfer): Voorbeeld 1: Wanneer het productversienummer 0x0A is (equivalent aan 10 in decimalen), is het versienummer V1.0. Voorbeeld 2: Wanneer het productversienummer 0x65 is (equivalent aan 101 in decimalen), is het versienummer V10.1. |
|||||||
|
|
|
|
|
|
|
|
|
| Tabel 2-1: Stopbereikmeting | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x10 | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | gegevensbeschrijving | gegevensveld | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x43 | 06 | ||
|
|
|
||||||
| Tabel 2-2 Meting met enkel bereik | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x12 | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | gegevensbeschrijving | Afstandsgegevens | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x04 | 0 - 0xFFFF | ||
|
|
|
|
|
|
|
|
|
| Tabel 2-3 Continu bereik | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x13 | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | gegevensbeschrijving | Afstandsgegevens | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x04 | 0 - 0xFFFF | ||
|
|
|
|
|
|
|
|
|
| Tabel 3-1: Laserindicator uit | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x18 | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | gegevensbeschrijving | gegevensveld | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x43 | 06 | ||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| Tabel 3-2 Laserindicator aan (met laserindicator) | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x19 | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | gegevensbeschrijving | gegevensveld | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x43 | 06 | ||
|
|
|
|
|
|
|
|
|
| Tabel 4-1: Circuitschakelaar voor randapparatuur | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x1A | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | gegevensbeschrijving | gegevensveld | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x43 | 06 | ||
|
|
|
|
|
|
|
|
|
| Tabel 4-2: Randapparatuurcircuit open | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x1B | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | gegevensbeschrijving | gegevensveld | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x43 | 06 | ||
| Opmerking: Het uitschakelen van randcircuits vermindert het stroomverbruik, maar kan een vertraging veroorzaken in de aanvankelijke responstijd. | |||||||
|
|
|
|
|
|
|
|
|
| Tabel 5-1: Wijziging van de baudrate | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | DL | instrueren | parameter | Controlesom | |
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x04 | 0x20 | nieuw haventarief | |
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | gegevensbeschrijving | frametype | parameter | Controlesom | |
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x44 | 0xA1 | nieuw haventarief | |
| Opmerking: De nieuwe baudsnelheid vereist een herstart van het systeem om van kracht te worden. | |||||||
|
|
|
|
|
|
|
|
|
| Tabel 5-2 | |||||||
| Baudrate: 460800, Moduleadres: 0x00 | |||||||
|
|
|
|
|
|
|
|
|
| Tabel 6-1: Gewijzigde moduleadressen | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | DL | instrueren | Nieuw adres | Controlesom | |
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x04 | 0x22 | 0 - 0xFF | |
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | gegevensbeschrijving | frametype | Nieuw adres | Controlesom | |
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x44 | 0xA3 | 0 - 0xFF | |
| Opmerking 1: Het nieuwe moduleadres wordt onmiddellijk van kracht. | |||||||
| Opmerking 2: Adres 0xFF is een broadcastadres; | |||||||
|
|
|
|
|
|
|
|
|
| Tabel 6-2 Moduleadres lezen | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x23 | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
| betekenis | framekop | module-adres | gegevensbeschrijving | frametype | Nieuw adres | Controlesom | |
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x44 | 0xA3 | 0 - 0xFF | |
|
|
|
|
|
|
|
|
|
| Tabel 7-1 Softwareversie | |||||||
| Uitgegeven door de hostcomputer | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5 | |
| betekenis | framekop | module-adres | DL | instrueren | Controlesom | ||
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x03 | 0x2F | ||
| module-emissie | |||||||
| byte | 0 | 1 | 2 | 3 | 4 | 5,6,7 | 8 |
| betekenis | framekop | module-adres | gegevensbeschrijving | frametype | versienummer | Controlesom | |
| numerieke waarde | 0xA5 | 0x5A | 0 - 0xFF | 0x46 | 0xAF | Zie opmerking 1-3 in Tabel 1 | |
Hottags: Laserafstandsmetermodule 120m 4Khz, fabrikanten, leveranciers, fabriek, China, gemaakt in China, aangepast, hoge kwaliteit
Gerelateerde categorie
905nm laserafstandsmetermodule
1535nm laserafstandsmetermodule
1570nm laserafstandsmetermodule
1.54UM Laser Rangefinder -module
1064nm Laser Target -aanduiding
Anti -drone Stemstemmodule
Variërende Lidar-module
Stuur onderzoek
Stel gerust uw vraag via onderstaand formulier. Wij zullen u binnen 24 uur antwoorden.





")