Thuis
>
Producten > Laserafstandsmetermodule > Anti -drone Stemstemmodule > 2MRAD 1 km laser afstandsmattermodule voor anti -drone -stest







2MRAD 1 km laser afstandsmattermodule voor anti -drone -stest
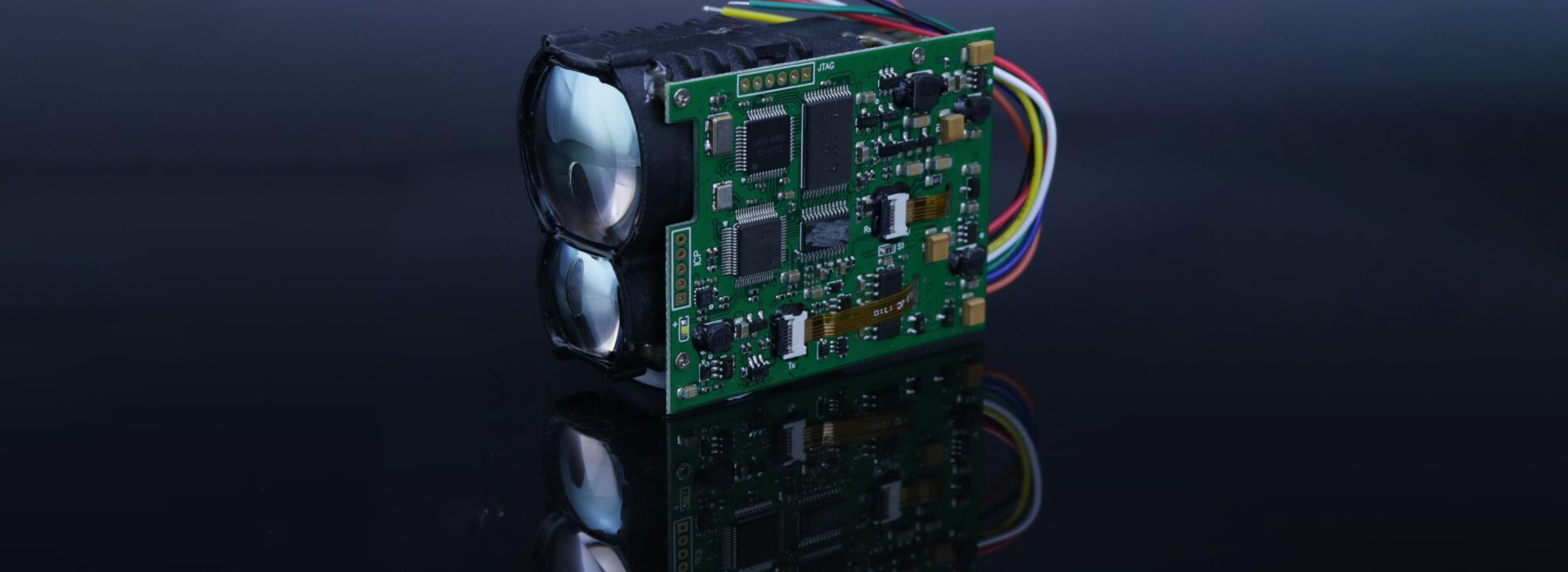
De compacte STA-WR1000X Laser Rangefinder-module is zeer geschikt voor integratie in de luchtafweersystemen van het leger en de marine. De afstandsmetingsmodule neemt de meest geavanceerde diode gepompte erbiumglaslaser aan, die hoge beschikbaarheid en lage onderhoudskosten heeft. De 2mrad divergentiehoek kan UAV's meten met een dwarsdoorsnede van 0,1 ㎡ tot 1000 meter, waardoor het een belangrijk onderdeel is van anti-dronesystemen.
Stuur onderzoek
Productomschrijving
1) single variërend en continu variërend;
2) reageren op laser -variërende commando's en stoppen op elk gewenst moment volgens het stopcommando;
3) Uitgangsgegevens en statusinformatie eenmaal per puls uitvoert tijdens het bereik;
4) het kan het cumulatieve aantal uitgezonden laserpulsen rapporteren (geen verlies van vermogen omlaag);
5) Afstandselectie, voor en na doelindicatie;
6) zelftestfunctie.
2) reageren op laser -variërende commando's en stoppen op elk gewenst moment volgens het stopcommando;
3) Uitgangsgegevens en statusinformatie eenmaal per puls uitvoert tijdens het bereik;
4) het kan het cumulatieve aantal uitgezonden laserpulsen rapporteren (geen verlies van vermogen omlaag);
5) Afstandselectie, voor en na doelindicatie;
6) zelftestfunctie.
Laser variërende functie;
Laserbestralingsfunctie;
Foto -elektrisch isolatiesignaaltrigger;
gedemonteerd richtbalk;
externe trigger -functie;
Laserbestralingsfunctie;
Foto -elektrisch isolatiesignaaltrigger;
gedemonteerd richtbalk;
externe trigger -functie;
Belangrijkste technische indicatoren
| Optische index | |
| Golflengte | 1535 nm ± 5 nm |
| Laser -divergentiehoek | ≤2mrad |
| Effectief ontvangen van opening | 25 mm |
| Bereikfrequentie | Enkele, 1 ~ 10Hz verstelbaar |
| Bereik | Zichtbaarheid ≥ 12 km, doelreflectiviteit ≥ 0,3, vochtigheid ≤ 80%, UAV -variërende afstand (0,25 m x 0,25 m) ≥ 2 km |
| Variërend nauwkeurigheid | ≤ ± 1 m (rms) |
| Nauwkeurigheidsmeting | ≥98% |
| Valse alarmpercentage | ≤1% |
| Minimaal meetbereik | ≤30m |
| Laseras stabiliteit | ≤0,05 mrad |
| De optische as is parallel aan de installatiereferentie | ≤0,3 mrad |
| Mechanische indicatoren | |
| Maat | ≤52 mm × 45 mm × 35 mm |
| Gewicht | ≤75 g |
| Elektrische indicatoren | |
| Leveren elektriciteit | DC9V ~ 32V |
| Power Dissipation | Werk minder dan 3W@10Hz, piekverbruik minder dan 5W |
| Interface | RS422 -interface, 115200bps |
| Power on Control Interface | Wanneer de veilige afstand wordt bereikt, kan u deze aan en gebruik deze; of in de modus met een lage stroom om de werkstatus te regelen |
| Bescherming van de printplaat | Nadat het ontwerp en de foutopsporing van de printplaat is voltooid, is het vereist om de anti-schokverf te coaten en de behandeling "drie bescherming" te doen |
| Milieu -geschiktheid | |
| Werktemperatuur | -40 ℃ -65 ℃ |
| Opslagtemperatuur | -55 ℃ -70 ℃ |
| Trillen | GJB150.16 A-2009 "Militaire apparatuur Laboratorium Milieutestmethoden-Vibratietest" |
| Waggelen | GJB150.18 A-2009 "Militaire apparatuur Laboratorium Milieutestmethode-impact Test" |
Opmerking:
1. Rangbereikbeschrijving: het bereik verandert onder verschillende testomstandigheden en testdoelen, als u speciale doelen detecteert, neem dan contact op met de verkoopzijde om te bevestigen;
2. Minimale bereik: 30m-100m schommelingen, het wordt aanbevolen tot 50m na normaal gebruik; Vanwege de laserergie is groot, kan het gebruik van dichtbij de detectorchip verbranden, dus neem bij het debuggen een goede spiegelafdekking mee om te voorkomen dat de detectorchip wordt verbrand.
2. Minimale bereik: 30m-100m schommelingen, het wordt aanbevolen tot 50m na normaal gebruik; Vanwege de laserergie is groot, kan het gebruik van dichtbij de detectorchip verbranden, dus neem bij het debuggen een goede spiegelafdekking mee om te voorkomen dat de detectorchip wordt verbrand.
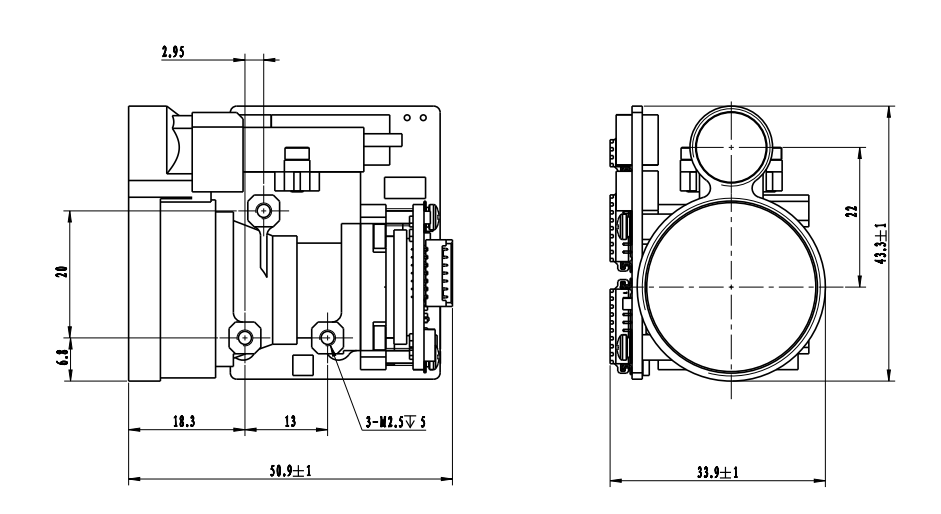
Mechanische structuurdiagram
Elektrische interface -vereisten
Communicatie -interface: RS422,115200bps, 1 startbit, 8 databits, 1 stopbit, geen pariteit;
Tabel 2 Interfacelijndefinitie
Tabel 2 Interfacelijndefinitie
| Pin | definitie | functie | opmerkingen |
| 1 | Rx+ | RS422 ontvangt positief |
|
| 2 | Rx- | RS422 ontvangt negatief |
|
| 3 | TX- | RS422 stuurt negatief |
|
| 4 | TX+ | RS422 stuurt positief |
|
| 5 | GND |
|
|
| 6 | Vee | 9-32V |
|
| 7 | GND |
|
|
| 8 | PWR_EN | verplicht | Slaapcontrole |
1. ANDERE INFORMATIE
1) STA-WR1000X Ranging-module wordt speciaal gebruikt om de afstand van UAV te meten;
2) Specificaties kunnen van tijd tot tijd worden herzien, bevestig de specificaties van de producten van de producten met de verkoper voordat u een bestelling plaatst;
3) De variërende module maakt gebruik van een uniform communicatieprotocol en bovenste computer. Neem contact op met de verkoper als u het moet bellen.
2. Communiceren protocol
1) Transmissieprotocol: asynchrone seriële communicatie;
2) Baud -tarief: 115200;
3) Gegevensbits: 10Bits: één startbit, 8 databits, 1 stopbit, ongeldige verificatie;
4) Gegevensstructuur: de gegevens bestaan uit de eerste byte, het opdrachtgedeelte, de gegevenslengte, het parameterdeel en de controle byte;
5) Communicatiemodus: de master verzendt besturingsopdrachten naar de variërende machine en de variërende machine ontvangt en voert de instructies uit. In de staatsstatus verzendt de variërende machine gegevens en status van de variërende machine terug naar de bovenste computer volgens de variërende cyclus. Het communicatie -formaat en de opdrachtinhoud worden in de volgende tabel weergegeven.
a) Hoofdcontrole verzendt
Het formaat van het te verzenden bericht is als volgt:
1) STA-WR1000X Ranging-module wordt speciaal gebruikt om de afstand van UAV te meten;
2) Specificaties kunnen van tijd tot tijd worden herzien, bevestig de specificaties van de producten van de producten met de verkoper voordat u een bestelling plaatst;
3) De variërende module maakt gebruik van een uniform communicatieprotocol en bovenste computer. Neem contact op met de verkoper als u het moet bellen.
2. Communiceren protocol
1) Transmissieprotocol: asynchrone seriële communicatie;
2) Baud -tarief: 115200;
3) Gegevensbits: 10Bits: één startbit, 8 databits, 1 stopbit, ongeldige verificatie;
4) Gegevensstructuur: de gegevens bestaan uit de eerste byte, het opdrachtgedeelte, de gegevenslengte, het parameterdeel en de controle byte;
5) Communicatiemodus: de master verzendt besturingsopdrachten naar de variërende machine en de variërende machine ontvangt en voert de instructies uit. In de staatsstatus verzendt de variërende machine gegevens en status van de variërende machine terug naar de bovenste computer volgens de variërende cyclus. Het communicatie -formaat en de opdrachtinhoud worden in de volgende tabel weergegeven.
a) Hoofdcontrole verzendt
Het formaat van het te verzenden bericht is als volgt:
| STX0 | CMD | Len | Data1H | Data1L | Chk |
Tabel 2 Formaat Beschrijving van het verzonden bericht
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Bericht Start vlag | A5 (H) |
|
| 2 | CMD | CW | Zie tabel 3 |
|
| 3 | Len | DL | Het aantal van alle bytes behalve het startmarkering, opdrachtwoord en checksum |
|
| 4 | Datah | parameter | Zie tabel 3 |
|
| 5 | aankomst |
|
||
| 6 | Chk | XOR -verificatie | Behalve de geldige byte, zijn alle andere bytes Xored |
|
Het commando wordt als volgt beschreven:
Tabel 3 Beschrijving van opdrachten en gegevenswoorden die door de master naar de variërende machine worden verzonden
Tabel 3 Beschrijving van opdrachten en gegevenswoorden die door de master naar de variërende machine worden verzonden
| bestelnummer | CW | functie | Data byte | opmerkingen | lengte | Voorbeeldcode |
| 1 | 0x00 | ophouden | Datah = 00 (H) datal = 00 (H) | De afstandsmeter stopt met meten | Zes bytes | A5 00 02 00 A7 |
| 2 | 0x01 | Single Ranging | Datah = 00 (H) datal = 00 (H) |
|
Zes bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Continu variërend | Datah = xx (h) datal = jy (h) | Gegevens beschrijven de variërende periode, in MS | Zes bytes | A5 02 02 03 E8 4E (1Hz variërend) |
| 4 | 0x03 | zelfcontrole | Datah = 00 (H) datal = 00 (H) |
|
Zes bytes | A5 02 02 00 A4 |
| 5 | 0x04 | Stel de dichtstbijzijnde afstand in op de selectie | Datah = xx (h) datal = jy (h) | Gegevens beschrijven de blinde zonewaarde, eenheid 1m | Zes bytes | A5 04 02 00 64 C7 (100m is de dichtstbijzijnde afstand) |
| 6 | 0x06 | Cumulatief aantal lichtuitvoerquery's | Datah = 00 (H) datal = 00 (H) | Cumulatief aantal lichtuitvoerquery's | Zes bytes | A5 06 02 00 A1 |
| 7 | 0x11 | APD -kracht is ingeschakeld | Datah = 00 (H) datal = 00 (H) |
|
Zes bytes | A5 11 02 00 B6 |
| 8 | 0x12 | APD -kracht is uitgeschakeld | Datah = 00 (H) datal = 00 (H) |
|
Zes bytes | A5 12 02 00 B5 |
| 9 | 0xeb | Nummerquery | Datah = 00 (H) datal = 00 (H) | Nummerquery | Zes bytes | A5 EB 02 00 00 4C |
b) Hoofdcontrole ontvangt formaat
Het formaat van het ontvangen bericht is als volgt:
Het formaat van het ontvangen bericht is als volgt:
| STX0 | CMD | Len | Gegevens | Datum0 | Chk |
Tabel 4 Formaat Beschrijving van ontvangen berichten
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Bericht Start vlag 1 | A5 (H) |
|
| 2 | Cmd_jg | Gegevensopdracht Word | Zie tabel 5 |
|
| 3 | Len | DL | Het aantal van alle bytes behalve het startmarkering, opdrachtwoord en checksum |
|
| 4 | DN | parameter | Zie tabel 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR -verificatie | Behalve de geldige byte, zijn alle andere bytes Xored |
|
Hoofdcontrole Ontvangstatusbeschrijving:
Tabel 5 beschrijft het gegevenswoord dat door de Rangefinder naar de hoofdcontroller is verzonden
Tabel 5 beschrijft het gegevenswoord dat door de Rangefinder naar de hoofdcontroller is verzonden
| bestelnummer | CW | functie | Data byte | opmerkingen | totale lengte |
| 1 | 0x00 | ophouden | D1 = 00 (H) D0 = 00 (H) |
|
Zes bytes |
| 2 | 0x03 | zelfcontrole | D8 ~ D1 | D8-D7: -5V-spanning, eenheid 0,01V.D6-D5: blinde vlekwaarde, eenheid 1md4: APD hoogspanningswaarde, eenheid V; D3: char-type, wat APD-temperatuur aangeeft, eenheid: graden celsius; d2-d1: +5V spanning, eenheid 0,01V 0,01V 0,01V 0,01V 0,01V 0,01V 0,01V | 12 bytes |
| 3 | 0x04 | Afstand tot de dichtstbijzijnde toegangsinstelling, eenheid M | D1 D0 | Gegevens beschrijven de dichtstbijzijnde afstandswaarde, eenheid 1m; start hoog en eind laag | Zes bytes |
| 4 | 0x06 | Cumulatief aantal lichtuitvoerquery's | D3 ~ D0 | Gegevens drukken het aantal keren dat licht wordt uitgestoten, 4 bytes, met de hoge byte als eerste | Zeven bytes |
| 5 | 0x11 | APD -kracht is ingeschakeld | D1 = 00 (H) D0 = 00 (H) | APD -kracht is ingeschakeld | Zes bytes |
| 6 | 0x12 | APD Power Off | D1 = 00 (H) D0 = 00 (H) | APD Power Off | Zes bytes |
| 7 | 0xed | Overwerk werken | 0x00 0x00 | De laser staat onder laser -werkbescherming en kan niet worden gemeten. | Zes bytes |
| 8 | 0xee | Effectiviteitsfouten | 0x00 0x00 |
|
Zes bytes |
| 9 | 0xef | Time -out van de seriële poortcommunicatie | 0x00 0x00 |
|
Zes bytes |
| 10 | 0x01 | Meting van één bereik (enkel doel, nul voor de tweede en derde doelen, nul voor het derde doelwit aan het begin en einde van het doel) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 Eerste doelafstand (eenheid 0,1 m) D5-D3-afstand tot de tweede doelwit (eenheid: 0,1 m) D2-D0 Derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij tot Fard9 (Bit7-Bit0) Flag Byte: D9 is het 7e bit om de hoofdgolf aan te geven; 1: Er is een hoofdgolf, 0: geen hoofdgolf.d9 is de 6e positie die echo aangeeft; 1: Er is echo, 0: geen echoD9 De vijfde positie geeft de laserstatus aan; 1: Normale laser, 0: Laser FaultD9 is het vierde bit van de time -outvlag, 1: normaal, 0: timeoutd9 is ongeldig op de 3e positie (ingesteld op 1); d9 De tweede positie geeft de APD -toestand aan; 1: Normaal, 0: Errord9 is de eerste positie om aan te geven of er een eerder doel is; 1: Er is een eerder doel, 0: geen vorig doel (doel in het blinde gebied) .d9 De 0e bit geeft aan of er een volgende doelwit is; 1: Er is een volgende doelwit, 0: geen daaropvolgend doel (het doel na het hoofddoel is de daaropvolgende doelwit) | 14 bytes |
| 11 | 0x02 | Continu variërend (enkel doel, nul voor de tweede en derde doelen, nul voor het derde doelwit aan het begin en einde van het doel) | D9 D8 D7 D6D5 D4D2 D1 D0 | D8-D6 Eerste doelafstand (eenheid 0,1 m) D5-D3-afstand tot de tweede doelwit (eenheid: 0,1 m) D2-D0 Derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij tot Fard9 (Bit7-Bit0) Flag Byte: D9 is het 7e bit om de hoofdgolf aan te geven; 1: Er is een hoofdgolf, 0: geen hoofdgolf.d9 is de 6e positie die echo aangeeft; 1: Er is echo, 0: geen echod9 De 5e bit geeft de lasersatus aan; 1: Normale laser, 0: Laser FaultD9 is het vierde bit van de time -outvlag, 1: normaal, 0: timeoutd9 is ongeldig op de 3e positie (ingesteld op 1); d9 De tweede positie geeft de APD -toestand aan; 1: Normaal, 0: Errord9 is de eerste positie om aan te geven of er een eerder doel is; 1: Er is een eerder doel, 0: geen vorig doel (doel in het blinde gebied) .d9 De 0e bit geeft aan of er een volgende doelwit is; 1: Er is een volgende doelwit, 0: geen daaropvolgend doel (het doel na het hoofddoel is de daaropvolgende doelwit) | 14 bytes |
| 12 | 0xeb | Nummerquery | D17 …… D0 | D17 D16 D15 D14 D13 D12 HELE MACHINE MODEL GEDRADE11D10 PRODUCT NUMMERD9 D6 SOFTWARE VERSERIED5 D4 APD NUMMERD3 D2 Laser Numberversion D1 van de FPGA | 22 bytes |
| OPMERKING: ① Niet -gedefinieerde gegevens byte/bit, standaard is 0; | |||||
Hottags: 2MRAD 1 km laser -afstandsmattermodule voor anti -drone -stest, fabrikanten, leveranciers, fabriek, China, gemaakt in China, op maat gemaakte, hoge kwaliteit
Gerelateerde categorie
905nm laserafstandsmetermodule
1535nm laserafstandsmetermodule
1570nm laserafstandsmetermodule
1.54UM Laser Rangefinder -module
1064nm Laser Target -aanduiding
Anti -drone Stemstemmodule
Variërende Lidar-module
Stuur onderzoek
Stel gerust uw vraag via onderstaand formulier. Wij zullen u binnen 24 uur antwoorden.