Thuis
>
Producten > Laserafstandsmetermodule > Anti -drone Stemstemmodule > 2mrad 2km laserafstandsmetermodule voor anti-drone-systeem







2mrad 2km laserafstandsmetermodule voor anti-drone-systeem
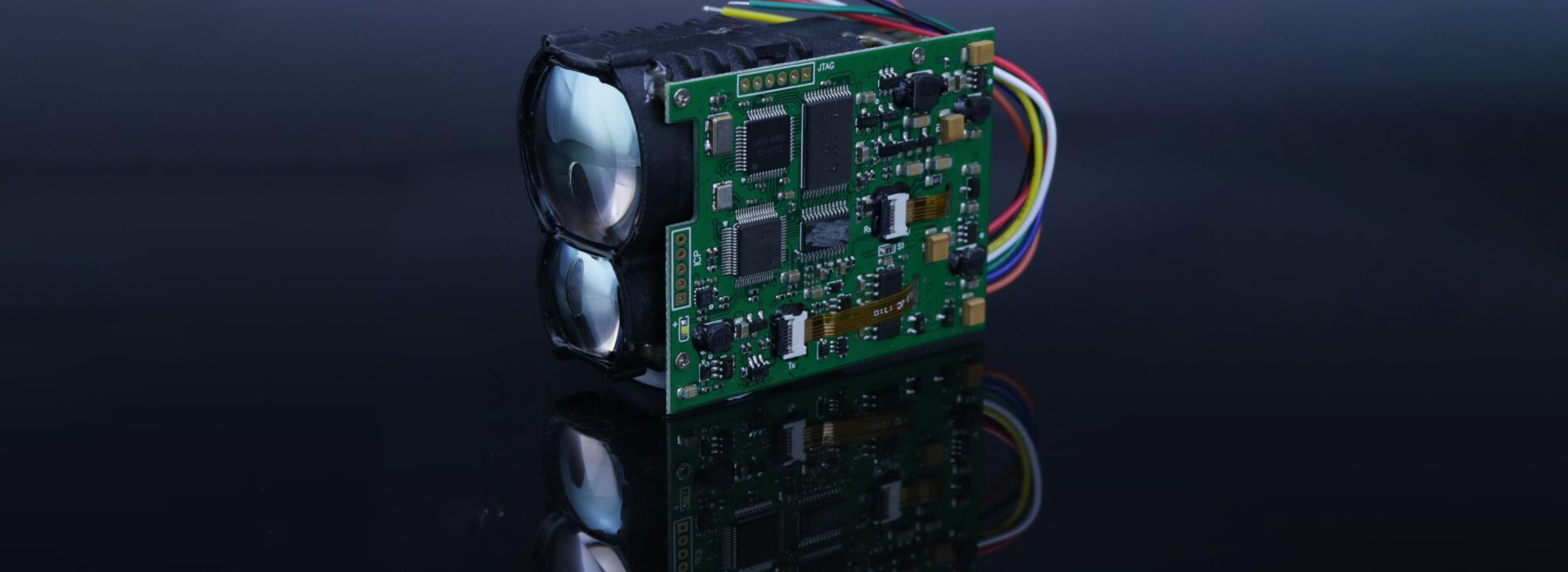
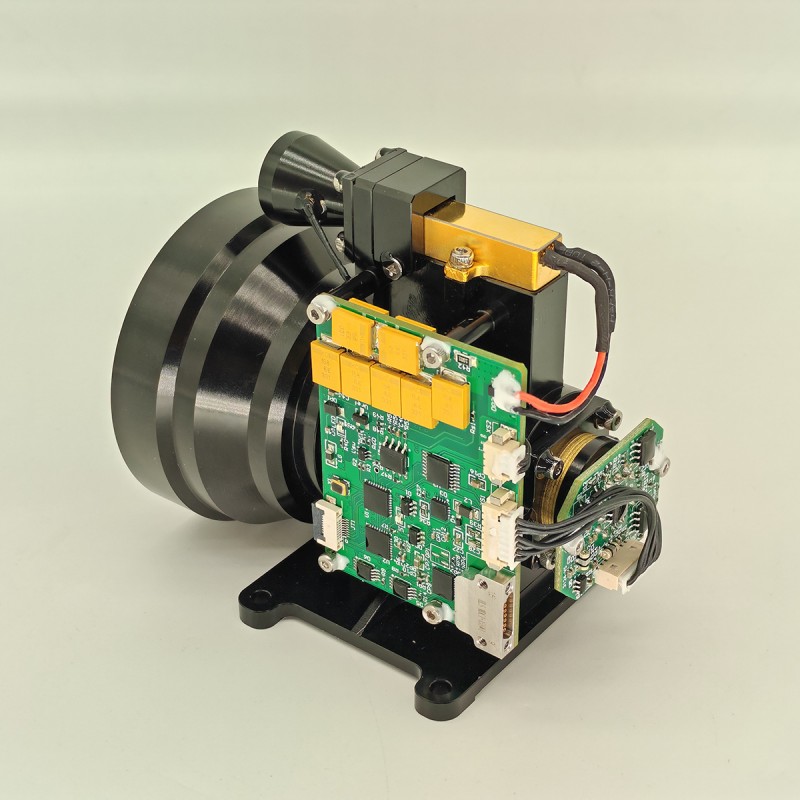
De compacte STA-WR2000X Laserafstandsmetermodule is uitermate geschikt voor integratie in de luchtverdedigingssystemen van landmacht en marine. De afstandsmeetmodule maakt gebruik van de meest geavanceerde diodegepompte erbium-glaslaser, die een hoge beschikbaarheid en lage onderhoudskosten heeft. De divergentiehoek van 2 mrad kan UAV's met een doorsnede van 0,1 ㎡ tot 2000 meter meten, waardoor het een belangrijk onderdeel is van anti-dronesystemen.
Stuur onderzoek
Productomschrijving
1) Enkelvoudig en continu bereik;
2) Reageren op laserafstandsopdrachten en op elk moment stoppen volgens het stopcommando;
3) Voert afstandsgegevens en statusinformatie eenmaal per puls uit tijdens het bereik;
4) Het kan het cumulatieve aantal verzonden laserpulsen rapporteren (geen verlies van stroomuitval);
5) Afstandsselectie, voor en na doelindicatie;
6) Zelftestfunctie.
2) Reageren op laserafstandsopdrachten en op elk moment stoppen volgens het stopcommando;
3) Voert afstandsgegevens en statusinformatie eenmaal per puls uit tijdens het bereik;
4) Het kan het cumulatieve aantal verzonden laserpulsen rapporteren (geen verlies van stroomuitval);
5) Afstandsselectie, voor en na doelindicatie;
6) Zelftestfunctie.
| Optische index | |
| Golflengte | 1535nm±5nm |
| Laserdivergentiehoek | ≤2mrad |
| Effectieve ontvangstopening | 56 mm |
| Bereik frequentie | Enkelvoudig, 1~10Hz instelbaar |
| Bereik | Zichtbaarheid ≥ 12 km, doelreflectiviteit ≥ 0,3, vochtigheid ≤ 80%, UAV-bereikafstand (0,25 m × 0,25 m) ≥ 2 km |
| Variërende nauwkeurigheid | ≤±1m (RMS) |
| Nauwkeurigheidsmeting | ≥98% |
| Vals alarmpercentage | ≤1% |
| Minimaal meetbereik | ≤50m |
| Stabiliteit van de laseras | ≤0,05 mrad |
| De optische as loopt parallel aan de installatiereferentie | ≤0,3 mrad |
| Mechanische indicatoren | |
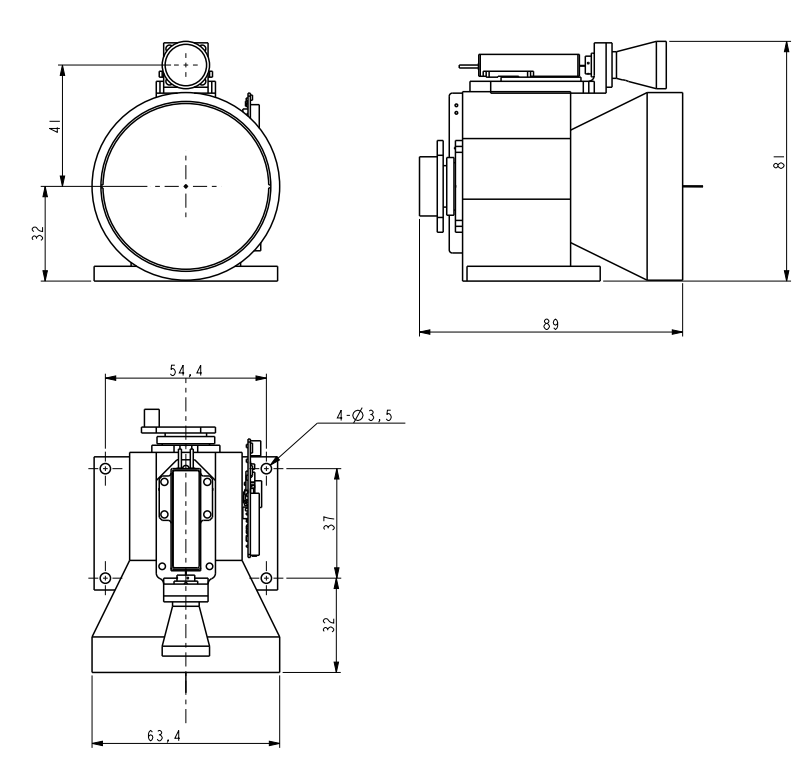
| Maat | ≤90×63×82mm |
| Gewicht | ≤300g |
| Elektrische indicatoren | |
| Elektriciteit leveren | DC9V~32V |
| Vermogensdissipatie | Werk minder dan 3W bij 10Hz, piekstroomverbruik minder dan 5W |
| Interface | RS422-interface, 115200 bps |
| Bedieningsinterface voor inschakelen | Wanneer de veilige afstand is bereikt, schakelt u deze in en gebruikt u deze; of in de energiebesparende modus om de werkstatus te controleren |
| Bescherming van printplaat | Nadat het ontwerp en het debuggen van de printplaat is voltooid, is het nodig om de anti-shockverf te coaten en de "drie beschermings" -behandeling uit te voeren |
| Milieugeschiktheid | |
| Werktemperatuur | -40℃-65℃ |
| Opslagtemperatuur | -55℃-70℃ |
| Trillen | GJB150.16 A-2009 "Militaire uitrusting Laboratorium Milieutestmethoden - Trillingstest" |
| Wimper | GJB150.18 A-2009 "Militaire uitrusting Laboratorium Milieutestmethode-impacttest" |
Opmerking:
1. Beschrijving van het bereik: het bereik zal veranderen onder verschillende testomstandigheden en testdoelen. Als u speciale doelen detecteert, neem dan contact op met de verkoopkant om dit te bevestigen;
2. Minimaal bereik: schommelingen van 30 m-100 m, het wordt aanbevolen tot 50 m na normaal gebruik; Omdat de laserenergie groot is, kan gebruik op korte afstand de detectorchip verbranden. Neem daarom bij het debuggen een goede spiegelafdekking mee om te voorkomen dat de detectorchip wordt verbrand.
1. Beschrijving van het bereik: het bereik zal veranderen onder verschillende testomstandigheden en testdoelen. Als u speciale doelen detecteert, neem dan contact op met de verkoopkant om dit te bevestigen;
2. Minimaal bereik: schommelingen van 30 m-100 m, het wordt aanbevolen tot 50 m na normaal gebruik; Omdat de laserenergie groot is, kan gebruik op korte afstand de detectorchip verbranden. Neem daarom bij het debuggen een goede spiegelafdekking mee om te voorkomen dat de detectorchip wordt verbrand.
Mechanisch structuurdiagram
Externe interface
| Pin | Definitie | Functie | Opmerkingen |
| 1 | RX+ | RS422 Ontvanger + | Blauw |
| 2 | RX- | RS422-ontvanger - | Groente |
| 3 | TX- | RS422-transmissie - | Paars |
| 4 | TX+ | RS422 Transmissie + | Geel |
| 5 | GND | Communicatie aardedraad | Wit |
| 6 | VEE | Voeding + | Rood |
| 7 | GND | Voeding - | Zwart |
| 8 | PWR NL | / | As |
OEM/ODM 1-15 km laserbereikmodule voor onbemande luchtsystemen (C-UAS)
Communicatieprotocol
1. Transmissieprotocol: asynchrone seriële communicatie;
2. Haventarief: 115200;
3. Databits: 10 bits: één startbit, 8 databits, één stopbit, ongeldige verificatie;
4. Datastructuur: De data bestaan uit de headerbyte, het commandogedeelte, de datalengte, het parametergedeelte en de controlebyte;
5. Communicatiemodus: de hoofdbesturing verzendt besturingsopdrachten naar de afstandsmachine, en de afstandsmachine ontvangt en voert de instructies uit. In de afstandsstatus stuurt de afstandsmachine gegevens en de status van de afstandsmachine terug naar de bovenste computer volgens de afstandscyclus. Het communicatieformaat en de opdrachtinhoud worden weergegeven in de volgende tabel.
A) Hoofdbediening verzendt
2. Haventarief: 115200;
3. Databits: 10 bits: één startbit, 8 databits, één stopbit, ongeldige verificatie;
4. Datastructuur: De data bestaan uit de headerbyte, het commandogedeelte, de datalengte, het parametergedeelte en de controlebyte;
5. Communicatiemodus: de hoofdbesturing verzendt besturingsopdrachten naar de afstandsmachine, en de afstandsmachine ontvangt en voert de instructies uit. In de afstandsstatus stuurt de afstandsmachine gegevens en de status van de afstandsmachine terug naar de bovenste computer volgens de afstandscyclus. Het communicatieformaat en de opdrachtinhoud worden weergegeven in de volgende tabel.
A) Hoofdbediening verzendt
Het formaat van het te verzenden bericht is als volgt:
| STX0 | CMD | LEN | DATA1H | DATA1L | CHK |
Tabel 2 Formaatbeschrijving van het verzonden bericht
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Startvlag voor bericht | A5(H) |
|
| 2 | CMD | CW | Zie tabel 3 |
|
| 3 | LEN | DL | Het aantal bytes behalve het startteken, het opdrachtwoord en de controlesom |
|
| 4 | DATAH | parameter | Zie tabel 3 |
|
| 5 | aankomst |
|
||
| 6 | CHK | XOR-verificatie | Behalve de geldige byte worden alle andere bytes XORed |
|
De opdracht wordt als volgt beschreven:
Tabel 3 Beschrijving van commando's en datawoorden die door de master naar de afstandsmachine worden verzonden
Tabel 3 Beschrijving van commando's en datawoorden die door de master naar de afstandsmachine worden verzonden
| bestelnummer | CW | functie | gegevensbyte | opmerkingen | lengte | Voorbeeldcode |
| 1 | 0x00 | ophouden | DATAH=00(H)DATAL=00(H) | De afstandsmeter stopt met meten | Zes bytes | A5 00 02 00 00 A7 |
| 2 | 0x01 | Enkel bereik | DATAH=00(H)DATAL=00(H) |
|
Zes bytes | A5 01 02 00 00 A6 |
| 3 | 0x02 | Continu bereik | DATAH=XX(H)DATAL=YY(H) | DATA beschrijft de bereikperiode, in ms | Zes bytes | A5 02 02 03 E8 4E (1 Hz bereik) |
| 4 | 0x03 | zelfcontrolerend | DATAH=00(H)DATAL=00(H) |
|
Zes bytes | A5 03 02 00 00 A4 |
| 5 | 0x04 | Stel de dichtstbijzijnde afstand tot de selectie in | DATAH=XX(H)DATAL=YY(H) | DATA beschrijft de blinde zonewaarde, eenheid 1m | Zes bytes | A5 04 02 00 64 C7(100m is de dichtstbijzijnde afstand) |
| 6 | 0x06 | Cumulatief aantal lichte uitvoerquery's | DATAH=00(H)DATAL=00(H) | Cumulatief aantal lichte uitvoerquery's | Zes bytes | A5 06 02 00 00 A1 |
| 7 | 0x11 | APD-stroom is ingeschakeld | DATAH=00(H)DATAL=00(H) |
|
Zes bytes | A5 11 02 00 00 B6 |
| 8 | 0x12 | APD-stroom is uitgeschakeld | DATAH=00(H)DATAL=00(H) |
|
Zes bytes | A5 12 02 00 00 B5 |
| 9 | 0xEB | Nummer opvragen | DATAH=00(H)DATAL=00(H) | Nummer opvragen | Zes bytes | A5 EB 02 00 00 4C |
a) Hoofdbediening ontvangt formaat
Het formaat van het ontvangen bericht is als volgt:
Het formaat van het ontvangen bericht is als volgt:
| STX0 | CMD | LEN | GEGEVENS | DATUM0 | CHK |
Tabel 4 Formaatbeschrijving van ontvangen berichten
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Beginvlag bericht 1 | A5(H) |
|
| 2 | CMD_JG | Gegevenscommandowoord | Zie tabel 5 |
|
| 3 | LEN | DL | Het aantal bytes behalve het startteken, het opdrachtwoord en de controlesom |
|
| 4 | Dn | parameter | Zie tabel 5 |
|
| 5 | D0 |
|
||
| 6 | CHK | XOR-verificatie | Behalve de geldige byte worden alle andere bytes XORed |
|
Hoofdbediening ontvangststatusbeschrijving:
Tabel 5 beschrijft het datawoord dat door de afstandsmeter naar de mastercontroller wordt verzonden
Tabel 5 beschrijft het datawoord dat door de afstandsmeter naar de mastercontroller wordt verzonden
| bestelnummer | CW | functie | gegevensbyte | opmerkingen | Totale lengte |
| 1 | 0x00 | ophouden | D1=00(H)D0=00(H) |
|
Zes bytes |
| 2 | 0x03 | zelfcontrolerend | D8~D1 | D8-D7: -5V spanning, eenheid 0,01V.D6-D5: Dodehoekwaarde, eenheid 1mD4: APD hoogspanningswaarde, eenheid V;D3: char-type, geeft APD-temperatuur aan, eenheid: graden Celsius;D2-D1: +5V spanning, eenheid 0,01V | 12 bytes |
| 3 | 0x04 | Afstand tot de dichtstbijzijnde toegangsinstelling, eenheid m | D1 D0 | DATA beschrijft de dichtstbijzijnde afstandswaarde, eenheid 1m; Begin hoog en eindig laag | Zes bytes |
| 4 | 0x06 | Cumulatief aantal lichte uitvoerquery's | D3~D0 | DATA drukt het aantal lampjes uit, 4 bytes, met de hoge byte eerst | Zeven bytes |
| 5 | 0x11 | APD-stroom is ingeschakeld | D1=00(H)D0=00(H) | APD-stroom is ingeschakeld | Zes bytes |
| 6 | 0x12 | APD-stroom uitgeschakeld | D1=00(H)D0=00(H) | APD-stroom is uitgeschakeld | Zes bytes |
| 7 | 0xED | Overuren maken | 0x00 0x00 | DATA drukt het aantal lampjes uit, 4 bytes, met de hoge byte eerst | Zes bytes |
| 8 | 0xEE | Effectiviteitsfouten | 0x00 0x00 |
|
Zes bytes |
| 9 | 0XEF | Time-out voor communicatie via seriële poort | 0x00 0x00 |
|
Zes bytes |
| 10 | 0x01 | Meting met enkel bereik (enkel doel, nul voor het tweede en derde doel, nul voor het derde doel aan het begin en einde van het doel) | D9D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 eerste doelafstand (eenheid 0,1 m)D5-D3 afstand tot het tweede doel (eenheid: 0,1 m)D2-D0 derde doelafstand (eenheid 0,1 m)3. Doelen zijn van dichtbij tot verD9 (bit7-bit0) vlagbyte:D9 is de 7e positie die de hoofdgolf aangeeft; 1: er is een hoofdgolf, 0: geen hoofdgolf. D9 is de 6e positie die de echo aangeeft; 1: er is echo, 0: geen echoD9 De vijfde positie geeft de laserstatus aan; 1: normale laser, 0: laserfoutD9 is de vierde bit van de time-outvlag, 1: normaal, 0: time-outD9 is ongeldig op de 3e positie (ingesteld op 1);D9 De tweede positie geeft de APD-status aan; 1: normaal, 0: foutD9 is de eerste positie die aangeeft of er een eerder doel is; 1: er is een vorig doel, 0: geen vorig doel (doel in het blinde gebied).D9 De 0-de bit geeft aan of er een volgend doel is; 1: er is een vervolgdoel, 0: geen vervolgdoel (het doel na het hoofddoel is het vervolgdoel) | 14 bytes |
| 11 | 0x02 | Continu bereik (enkel doel, nul voor het tweede en derde doel, nul voor het derde doel aan het begin en einde van het doel) | D9 D8 D7 D6D5 D4 D3D2 D1 D0 | D8-D6 eerste doelafstand (eenheid 0,1 m)D5-D3 afstand tot het tweede doel (eenheid: 0,1 m)D2-D0 derde doelafstand (eenheid 0,1 m)3. Doelen zijn van dichtbij tot verD9 (bit7-bit0) vlagbyte:D9 is het 7e bit om de hoofdgolf aan te geven; 1: er is een hoofdgolf, 0: geen hoofdgolf. D9 is de 6e positie die de echo aangeeft; 1: er is echo, 0: geen echoD9 De vijfde positie geeft de laserstatus aan; 1: normale laser, 0: laserfoutD9 is de vierde bit van de time-outvlag, 1: normaal, 0: time-outD9 is ongeldig op de 3e positie (ingesteld op 1);D9 De tweede positie geeft de APD-status aan; 1: normaal, 0: foutD9 is de eerste positie die aangeeft of er een eerder doel is; 1: er is een vorig doel, 0: geen vorig doel (doel in het blinde gebied).D9 De 0-de bit geeft aan of er een volgend doel is; 1: er is een vervolgdoel, 0: geen vervolgdoel (het doel na het hoofddoel is het vervolgdoel) | 14 bytes |
| 12 | 0xEB | Nummer opvragen | D17…… D0 | D17 D16 D15 D14 D13 D12 Modelcode hele machineD11D10 ProductnummerD9 D6 softwareversieD5 D4 APD-nummerD3 D2 LasernummerVersie D1 van FPGA | 22 bytes |
| Opmerking: ① Ongedefinieerde databyte/bit, standaard is 0; | |||||
Hottags: 2mrad 2 km laserafstandsmetermodule voor anti-drone-ststem, fabrikanten, leveranciers, fabriek, China, gemaakt in China, aangepast, hoge kwaliteit
Gerelateerde categorie
905nm laserafstandsmetermodule
1535nm laserafstandsmetermodule
1570nm laserafstandsmetermodule
1.54UM Laser Rangefinder -module
1064nm Laser Target -aanduiding
Anti -drone Stemstemmodule
Variërende Lidar-module
Stuur onderzoek
Stel gerust uw vraag via onderstaand formulier. Wij zullen u binnen 24 uur antwoorden.