Thuis
>
Producten > Laserafstandsmetermodule > 1064nm Laser Target -aanduiding > 45MJ Laser Target Designator (Ltd) WiHt Lrf




 WiHt Lrf")
45MJ Laser Target Designator (Ltd) WiHt Lrf
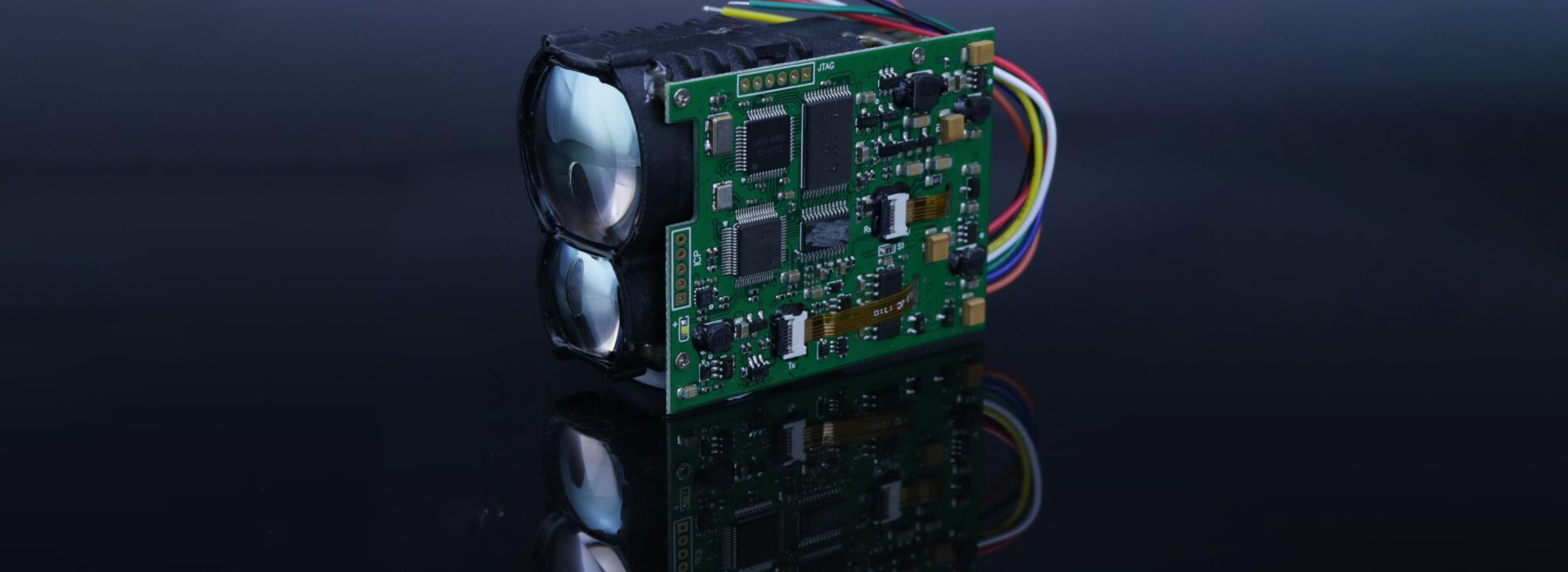
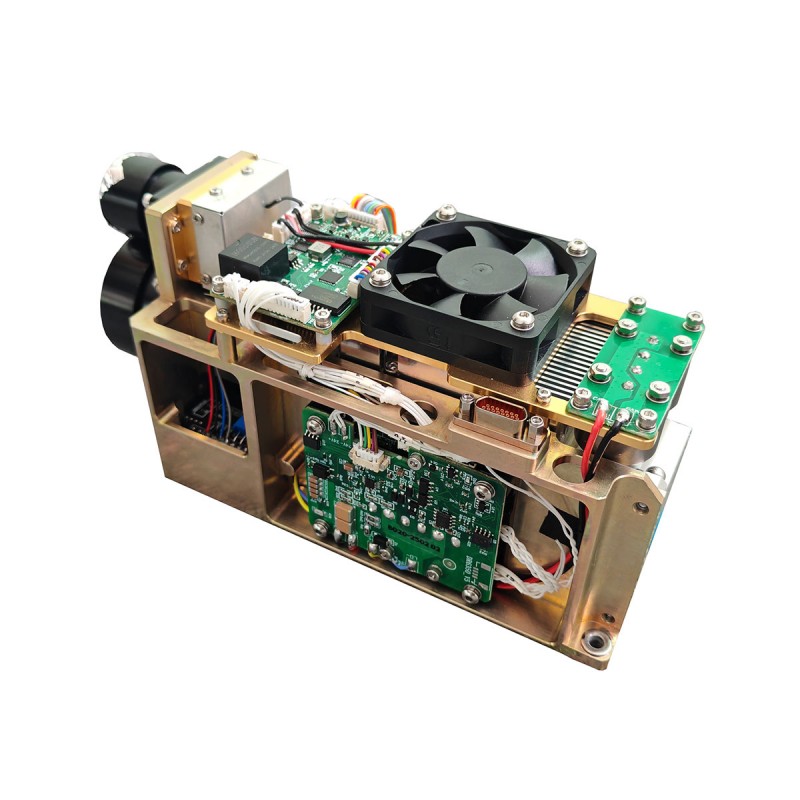
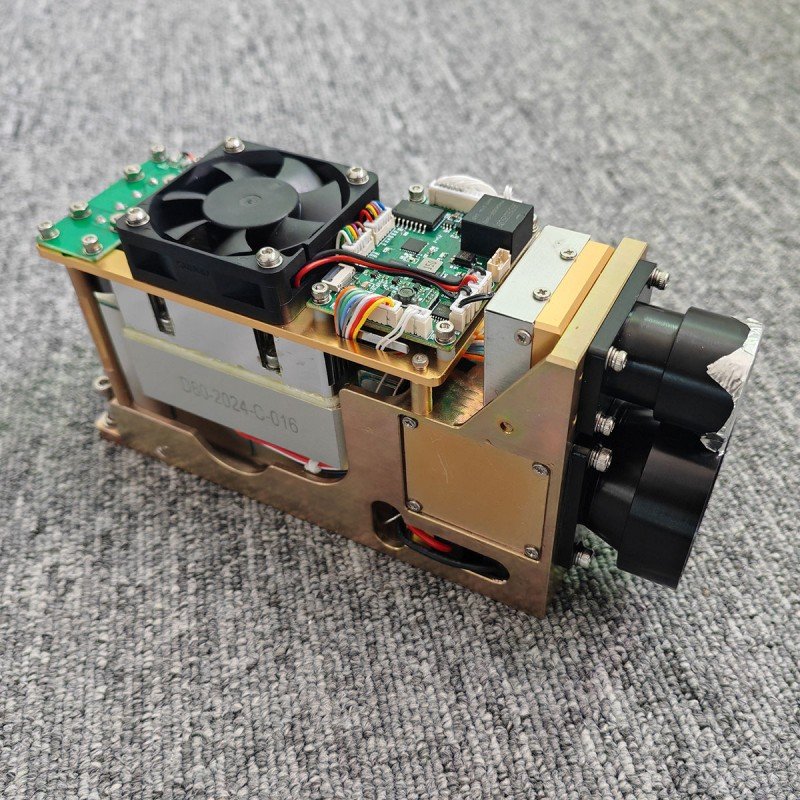
STA-B45M is een militaire 45MJ-laser-doelwitaanwijzer die een cruciale rol speelt in precisie-richtsystemen, in staat om precieze richtlijnen te bieden voor slimme munitie. Via een geavanceerd optisch systeem markeert het het doelwit met een laserstraal, waardoor precisiegeleide wapens het doelwit met een extreem hoge nauwkeurigheid en efficiëntie kunnen vernietigen.
Stuur onderzoek
Productomschrijving
Productfuncties
Lichtgewicht en geminiaturiseerd
Milieuaanpassingsvermogen: -40 ℃ ~ 60 ℃ Wijd temperatuuraanpassingsvermogen
Milieuaanpassingsvermogen: -40 ℃ ~ 60 ℃ Wijd temperatuuraanpassingsvermogen
Kernindicatorparameters
Functie
a) Het heeft de functie van het instellen van de bestralingscyclus en kan laserbestraling uitvoeren volgens de ingestelde cyclus.
b) uitgerust met laser single en herhaalde variërende functies.
c) uitgerust met multi-target variërende functie.
d) uitgerust met temperatuuruitvoerfunctie voor de kerncomponenten van de camera.
e) uitgerust met oververhittingsbeschermingsfunctie voor het meetapparaat.
f) uitgerust met de functie van de uitvoerstatusinformatie van het verlichtingsapparaat.
a) Het heeft de functie van het instellen van de bestralingscyclus en kan laserbestraling uitvoeren volgens de ingestelde cyclus.
b) uitgerust met laser single en herhaalde variërende functies.
c) uitgerust met multi-target variërende functie.
d) uitgerust met temperatuuruitvoerfunctie voor de kerncomponenten van de camera.
e) uitgerust met oververhittingsbeschermingsfunctie voor het meetapparaat.
f) uitgerust met de functie van de uitvoerstatusinformatie van het verlichtingsapparaat.
Technische parameters
| Model | STA-B6445M |
| Lasergolflengte | 1.06um (met behulp van ND: YAG Crystal, ontwerpselectiegarantie) |
| Lasergemiddelde energie | ≥ 45 MJ (energievolleschommelingen ≤ ± 8%); |
| laser -divergentiehoek | 0,5 mrad |
| laseremissie optische as stabiliteit | ≤ 0,05 mrad |
| Laseremissie optische as en de installatie van het basisvlak is niet parallel | ≤ 3 '(ontwerpgarantie); |
| Laserpulsbreedte | 10ns ~ 22ns |
| Max variërend | Zichtbaarheid ≥ 12 km, maximaal bereik voor het meten van de NAVO -doelen ≥ 6 km; |
| Mini -variërend | 100m |
| Variërend herhaalfrequentie | 1Hz/5Hz/single |
| Variërend nauwkeurigheid | ≤ ± 2m (rms) |
| variërend nauwkeurigheid | ≥ 98% |
| Afstandsresolutie | ≤ 50m |
| Continu variërende werktijd | 5min (5Hz: continu werk 5min, rust ≤ 3min, kan blijven variëren). |
| Maximale bestralingafstand | ≥ 5 km |
| Minimale bestralingafstand | ≤ 500m (met de systeembeoordeling) |
| Continue bestralingscyclus | 8, elke cyclus duurt 25s, met een interval van 15S; Na 8 cycli, rustinterval ≤ 20 minuten; |
| Lasercodeperiode (ingesteld door communicatieprotocol) | instellingsbereik 40ms ~ 100ms |
| Lasercodering timing nauwkeurigheid | ≤ ± 2μs |
| Laser opstarttijd | ≤3min |
| Extra-code synchronisatiefunctie | Ja |
| Werktemperatuur: | -40 ~+60 ℃ |
| Opslagtemperatuur | -50 ~+70 ℃ |
| Gewicht | ≤580g |
| Module voor jou | 138x75x50mm |
| met multi-target meetmogelijkheden en retourneer drie multi-target waarde, met afstand selectieve pass-functie. Frequente code en variabele intervalcode kunnen worden ingesteld (ingesteld door communicatieprotocol). | |
Voorbereiding voor gebruik
Controleer of de voedingspanning tussen 18V en 32V ligt. Wanneer de spanning te laag is (minder dan 18V), kan de afstandsmeter niet correct communiceren of ‘geen laseruitgang’ aangeven, en wanneer de spanning te hoog is (meer dan 32V), kan de hele verlichting permanent worden beschadigd. Zorg ervoor dat de nominale uitgangsstroom van het voedingssysteem groter is dan 6A, als het minder is dan deze waarde, is er mogelijk geen laser tijdens de werking. Zorg ervoor dat de polariteit van de voeding correct is verbonden, er is een risico op schade aan de apparatuur als de polariteit wordt teruggedraaid. Zie Bijlage A voor definities van stroomaansluitingen.
Voorzorgsmaatregelen voor gebruik
a) De laser die door deze afstandsmeter wordt uitgezonden, is een 1,06 µm niet-Eye veilige golflengtelaser, vermijd direct laserlicht in de ogen bij gebruik.
B) Zorg ervoor dat u bij het aanpassen van de parallellisme van de optische as de ontvangende lens blokkeert, anders wordt de detector permanent beschadigd vanwege de sterke echo.
c) Deze afstandsmattermodule is niet-luchtdicht, zorg ervoor dat de relatieve vochtigheid van het milieu minder is dan 80%, en zorg ervoor dat het gebruik van milieu-netheid en hygiëne, om de laser niet te beschadigen.
d) Het bereik van de afstandsmeter is gerelateerd aan de atmosferische zichtbaarheid en de aard van het doelwit, in het geval van mist, regen en wind en zand variërend zal het bereik verminderen. Doelen zoals groene bladclusters, witte wanden en blootgestelde kalksteen hebben een betere reflectiviteit en kunnen het bereik vergroten. Bovendien zal een toename van de helling van het doelwit naar de laserstraal het bereik verminderen.
e) Het is ten strengste verboden om de laserstraal af te vuren op sterk reflecterende doelen zoals glas en witte wanden binnen 100 meter om sterke echo's te voorkomen, wat schade aan de APD -detector kan veroorzaken.
f) Het is ten strengste verboden om de kabel los te koppelen of aan te sluiten terwijl deze wordt bekrachtigd.
g) Zorg ervoor dat de stroompolariteit correct is aangesloten, anders zal deze leiden tot permanente schade aan het apparaat.
B) Zorg ervoor dat u bij het aanpassen van de parallellisme van de optische as de ontvangende lens blokkeert, anders wordt de detector permanent beschadigd vanwege de sterke echo.
c) Deze afstandsmattermodule is niet-luchtdicht, zorg ervoor dat de relatieve vochtigheid van het milieu minder is dan 80%, en zorg ervoor dat het gebruik van milieu-netheid en hygiëne, om de laser niet te beschadigen.
d) Het bereik van de afstandsmeter is gerelateerd aan de atmosferische zichtbaarheid en de aard van het doelwit, in het geval van mist, regen en wind en zand variërend zal het bereik verminderen. Doelen zoals groene bladclusters, witte wanden en blootgestelde kalksteen hebben een betere reflectiviteit en kunnen het bereik vergroten. Bovendien zal een toename van de helling van het doelwit naar de laserstraal het bereik verminderen.
e) Het is ten strengste verboden om de laserstraal af te vuren op sterk reflecterende doelen zoals glas en witte wanden binnen 100 meter om sterke echo's te voorkomen, wat schade aan de APD -detector kan veroorzaken.
f) Het is ten strengste verboden om de kabel los te koppelen of aan te sluiten terwijl deze wordt bekrachtigd.
g) Zorg ervoor dat de stroompolariteit correct is aangesloten, anders zal deze leiden tot permanente schade aan het apparaat.
Definitie van interfacesockets
Tabel 1 Definitie van externe interfaces
Tabel 1 Definitie van externe interfaces
| Bestelnummer | Interfacetype | Pigment | Definitie | Opmerkingen |
| 1 | DB9 -interfacedefinitie | Palm | RS422 T+ | RS422 Communicatie -interface |
| 2 | Paars | RS422 T- | ||
| 3 | Geel | RS422 R- | ||
| 4 | Groente | RS422 R+ | ||
| 5 | Wit | GND | ||
| 6 | As | Externe trigger- | RS422 -niveau | |
| 7 | Blauw | Externe trigger + | ||
| 8 | Definitie van stroominterface | Zwart | VCC+ | DC 18V ~ 32V |
| 9 | Rood | VCC- |

Figuur 2 Tweedimensionaal groottediagram van het product
Interface communicatieprotocol
1. Communicatie -indeling:
a) De standaard baudrate is 115200bps.
b) Gegevensindeling: 8-bit gegevens, één startbit, één stopbit, geen pariteitscontrole, gegevens bestaan uit koptekst-byte, opdrachtgedeelte, gegevenslengte, parameteronderdeel en controle byte.
2. Communicatiemodus:
a) De master en het meetapparaat gebruiken de master-slave communicatiemodus, waarbij de master besturingsopdrachten naar het meetapparaat verzendt en het meetapparaat de instructies ontvangt en uitvoert. In de staatsstatus verzendt het meetapparaat de gegevens en status van het meetapparaat terug naar de bovenste computer volgens de variërende periode, en het communicatieformaat en de opdrachtinhoud worden in de volgende tabel weergegeven.
b) Nadat de master het besturingsopdracht verzendt, reageert de meter continu met drie responsopdrachten. Als de master het opdracht Response niet binnen de tijdslimiet van de meter ontvangt, wordt deze opnieuw opnieuw verzenden.
Het formaat van het te verzenden bericht is als volgt
a) De standaard baudrate is 115200bps.
b) Gegevensindeling: 8-bit gegevens, één startbit, één stopbit, geen pariteitscontrole, gegevens bestaan uit koptekst-byte, opdrachtgedeelte, gegevenslengte, parameteronderdeel en controle byte.
2. Communicatiemodus:
a) De master en het meetapparaat gebruiken de master-slave communicatiemodus, waarbij de master besturingsopdrachten naar het meetapparaat verzendt en het meetapparaat de instructies ontvangt en uitvoert. In de staatsstatus verzendt het meetapparaat de gegevens en status van het meetapparaat terug naar de bovenste computer volgens de variërende periode, en het communicatieformaat en de opdrachtinhoud worden in de volgende tabel weergegeven.
b) Nadat de master het besturingsopdracht verzendt, reageert de meter continu met drie responsopdrachten. Als de master het opdracht Response niet binnen de tijdslimiet van de meter ontvangt, wordt deze opnieuw opnieuw verzenden.
Het formaat van het te verzenden bericht is als volgt
| STX0 | CMD | Len | Data1H | Data1L | Chk |
Tabel 2 Formaat Beschrijving van het verzonden bericht
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Bericht Start vlag | 55 (h) |
|
| 2 | CMD | CW | Zie tabel 3 |
|
| 3 | Len | DL | Het aantal van alle bytes behalve het startmarkering, opdrachtwoord en checksum |
|
| 4 | Datah | parameter | Zie tabel 3 |
|
| 5 | aankomst |
|
||
| 6 | Chk | XOR -verificatie | Behalve de geldige byte, zijn alle andere bytes Xored |
|
Het commando wordt als volgt beschreven:
Tabel 3 Beschrijving van opdrachten en gegevenswoorden die door de master naar de meter worden verzonden
Tabel 3 Beschrijving van opdrachten en gegevenswoorden die door de master naar de meter worden verzonden
| bestelnummer | CW | functie | Data byte | opmerkingen | lengte | Voorbeeldcode |
| 1 | 0x00 | Stop (stop met verlichting) | D1 = 00 (H) D0 = 00 (H) |
|
Zes bytes | 55 00 02 00 00 57 |
| 2 | 0x01 | Single Ranging | D1 = 00 (H) D0 = 00 (H) | Het meetapparaat ontvangt een enkele uiteenlopende instructie, voert een variërende bewerking uit en uploadt de variërende afstandswaarde tegelijkertijd; | Zes bytes | 55 01 02 00 00 56 |
| 3 | 0x02 | Continu variërend | D1 = xx (h) d0 = jy (h) | Volgens de set variërende periode wordt de variërende afstandswaarde continu geüpload. Data drukt de variërende periode uit en de eenheid is MS | Zes bytes | 55 02 02 03 E8 be (1Hz Ranging) |
| 4 | 0x03 | zelfcontrole | D1 = 00 (H) D0 = 00 (H) |
|
Zes bytes | 55 03 02 00 00 54 |
| 5 | 0x04 | Blinde zone -opstelling | D1 = xx (h) d0 = jy (h) | Gegevens beschrijven de blinde zone -waarde, eenheid 1m, en stelt het afstands display in de blinde zone in op 0; | Zes bytes | 55 04 02 01 2C 7E (300m is de dichtstbijzijnde afstand) |
| 6 | 0x06 | Cumulatief aantal lichtuitvoerquery's | D1 = 00 (H) D1 = 00 (H) | Power Off opslag; | Zes bytes | 55 06 02 00 00 51 |
| 7 | 0x31 | Stel de precieze code in | D4 D3 ~ D0 | D4: Nauwkeurig codenummer, ingebouwde 8 groepen, genummerd 1 ~ 8; d3 ~ d0 vertegenwoordigt de pulsperiode, eenheid USRange: 45000 ~ 60000 | Negen bytes | 55 31 05 01 00 00 C3 50 F3 (precieze codenummer: 1Cycle: 0000C350 = 50000US) |
| 8 | 0x32 | Stel variabele intervalcodes in | D33 (Ref.) D32 (aantal coderende bits) D31 ~ D30 (tijdsinterval tussen de laatste bit 0) D29 ~ D28 (tijdsinterval tussen bit 14 en bit 15) D27 ~ D26 (tijdsinterval tussen bit13 bit14) d25 ~ d24 (tijdsinterval tussen bit 12 en bit 13) d23 ~ d22 (tijdsinterval tussen bit12) d21 (tijdsinterval tussen bit12 (tijdsinterval tussen bit12) d21 (tijdsinterval tussen bit12 (tijdsinterval tussen bit12) d20 (tijdsinterval tussen bit12) bit10 bit11) d19 ~ d18 (tijdsinterval tussen bit9 bit10) d17 ~ d16 (tijdsinterval tussen bit8 bit9) d15 ~ d14 (tijdsinterval tussen bit7 bit8) d13 ~ d12 (tijdsinterval tussen bit6 en bit7) d11 ~ d10 (tijdsinterval tussen bit5 bit6) d9 ~ d8 (tijdsinterval tussen bit4 bit 5) d7 ~ d6 (tijdsinterval tussen bit3 ~ d6 (tijdsinterval tussen bit3 ~ d6 (tijdsinterval tussen bit3 ~ d6 (tijdsinterval tussen bit6) bit4) d5 ~ d4 (tijdsinterval tussen bit2 bit3) d3 ~ d2 (tijdsinterval tussen bit1 bit2) d1 ~ d0 (tijdsinterval tussen bit0 en bit1) | D33: Variabel intervalcodenummer, ingebouwde 16 groepen, het nummerbereik is 1 ~ 16; D32: aantal coderende bits, variërend van 3 tot 16 keer intervaleenheid USRange: 45000 ~ 60000 | 38 bytes |
|
| 9 | 0x33 | Instelling van pseudo-willekeurige codes | D4 D3 ~ D0 | D4: Pseudo-willekeurige codecodering, met 2 ingebouwde groepen, genummerd van 1 tot 2; D3: lengte van pseudo-niet-willekeurige code, variërend van 2 tot 16d2 d1: initiële waarde van pseudo-randomcode, die uit het onderste bit is genomen volgens de lengte van pseudo-random gecodeerd | Negen bytes | 55 33 05 01 10 AA AA 00 72 (Pseudo-willekeurige codenummer: 1Pseudo Random Code Lengte: 16initiële waarde: AAAA) |
| 10 | 0x41 | Stel de query in voor precisiecodes | D1 D0 | D1: precieze codenummer, het nummerbereik is 1 ~ 8d0: stand -by, set 0 | Zes bytes | 55 41 02 01 00 13 Set de query voor precisiecode 1 |
| 11 | 0x42 | Stel de query in voor variabele intervalcodes | D1 D0 | D1: variabel intervalcodenummer, het nummerbereik is 1 ~ 16d0: stand -by, set 0 | Zes bytes | 55 42 02 01 00 14 Set de query voor variabele codering 1 |
| 12 | 0x43 | Stel een query in voor pseudo-willekeurige codes | D1 D0 | D1: Pseudo-willekeurige codenummer, het nummerbereik is 1 ~ 2d0: stand-by, set 0 | Zes bytes | 55 43 02 01 00 15 Set de query met pseudo-willekeurige codering 1 |
| 13 | 0x44 | Continue bestraling werktijd instelling | D1 = 00 (H) D0 = jy (H) | YY continue bestralingstijd verwijst naar de continue werktijd van de meter onder de continue bestralingsmodus, eenheid s. De automatische stop wordt gestopt na time -out | Zes bytes | 55 44 02 00 3C 2fcontinue werktijd 60s |
| 14 | 0x45 | Continue bestraling werktijdquery | D1 = 00 (H) D0 = 00 (H) |
|
Zes bytes | 55 45 02 00 00 12 |
| 15 | 0x30 | Nauwkeurige code bestraling | D3 ~ D0 | D3: bestralingsmodus, 00 Continue bestraling, 01 Periodieke bestralingd2: 01 Precieze code bestralingd1: Precie | Acht bytes | 55 30 04 00 01 01 00 61Code 1, Continue verlichting van precieze code |
| Bestraling met variabele intervalcode | D3 ~ D0 | D3: bestralingsmodus, 00 continue bestraling; 01 Periodieke bestralingsdoding | Acht bytes | 55 30 04 00 02 01 00 62CODE 1, Variabele intervalcode Continue bestraling | ||
| Externe synchrone bestraling | D3 ~ D0 | D3: 00 Externe synchronisatie is alleen continu verlichtingd2: 03 Externe synchrone bestralingd1: 00d0: 00 | Acht bytes | 55 30 04 00 03 00 00 62 | ||
| Pseudo-willekeurige code bestraling | D3 ~ D0 | D3: bestralingsmodus, 00 continue bestraling; 01 Periodieke bestralingd2: 04 Pseudo-willekeurige code bestralingddd | Acht bytes | 55 30 04 00 04 01 00 64Code 1, Pseudo-willekeurige code continue bestraling | ||
| 16 | 0x24 | Periodieke bestralingsparameterinstelling | D2 D1 D0 | D2: Aantal werkcyclesd1: werktijd per cyclus, eenheid SD0: rusttijd per cyclus, in s | Zeven bytes | 55 24 03 08 14 0a 64 (8 cycli, 20s werk en 10s rust per cyclus) |
| 17 | 0x25 | Periodieke bestralingsparameterquery | D1 = 00 (H) D0 = 00 (H) |
|
Zes bytes | 55 25 02 00 00 72 |
| 18 | 0xeb | Uitrustingsnummer Query | D1 = 00 (H) D0 = 00 (H) |
|
Zes bytes | 55 EB 02 00 00 v.Chr. |
| 19 | 0x51 | Debug -modus | D1 D0 | D1: 01 Debuggingsmodus invoeren, 00 Exit Debugging Moded0: Standby | Zes bytes | 55 41 02 01 00 17 Enter Debug Mode55 41 02 00 00 16exit Debug -modus |
|
|
|
|
|
|
|
|
a) Hoofdcontrole ontvangt formaat
Het formaat van het ontvangen bericht is als volgt:
Het formaat van het ontvangen bericht is als volgt:
| STX0 | CMD | Len | Gegevens | Datum0 | Chk |
Tabel 4 Formaat Beschrijving van ontvangen berichten
| bestelnummer | naam | uitleggen | code | opmerkingen |
| 1 | STX0 | Bericht Start vlag 1 | 55 (h) |
|
| 2 | Cmd_jg | Gegevensopdracht Word | Zie tabel 5 |
|
| 3 | Len | DL | Het aantal van alle bytes behalve het startmarkering, het opdrachtwoord en het controlesom |
|
| 4 | DN | parameter | Zie tabel 5 |
|
| 5 | D0 |
|
||
| 6 | Chk | XOR -verificatie | Behalve de geldige byte, zijn alle andere bytes Xored |
|
Hoofdcontrole Ontvangstatusbeschrijving:
Tabel 5 beschrijft het gegevenswoord dat door de meter naar de master wordt verzonden
Tabel 5 beschrijft het gegevenswoord dat door de meter naar de master wordt verzonden
| bestelnummer | CW | Functiefeedback (overeenkomend met de opdracht besturingselementen ontvangen door het meetapparaat) | Data byte | opmerkingen | totale lengte |
| 1 | 0x00 | Stop (stop met verlichting) | D1 = 00 (H) D0 = XX (H) | XX: 00 Normale stop01 Stop bij hoge temperatuur 02 Stop wanneer achterstallige | Zes bytes |
| 2 | 0x03 | zelfcontrole | D8 ~ d0c5 ~ c0b2 ~ b0 | D8-D7 (int type): -5V voltage value feedback, unit 0.01V.D6-D5: Feedback of blind spot setting value, unit 1mD4-D3: APD high voltage feedback, unit V;D2: char type, indicating the main control environment temperature (environment), unit: degrees Celsius;D1-D0: +5V voltage feedback, unit 0.01VC5-C4: Actual drive current value feedback unit AC3-C2: Set the Feedback van aandrijfstroomwaarde in eenheid AC1-C0: Temperatuurregeling Temperatuur Feedback-eenheid 0,1 ℃ B2: Statusstatusstatus (8bit) Bit0: 0 Temperatuurregeling Naar temperatuur 1 Niet bereikt Bit1: 0 Temperatuurregeling Normaal 1 Temperatuurregeling is OvercurrentBit2: De aandrijfstroom is normaal 1. is groter dan 5AB1: Drive Communication Status (het meten van de communicatiestatus tussen de hoofdbesturingskaart en de aandrijfmodule) 0 is normaal en 1 is FaFBit0: Stel in of de huidige succesvol is: of de puls -breedte succesvol is ingesteld. Status tussen de hoofdbesturingskaart en de temperatuurregelingsmodule) 0 is normaal en 1 is FaultBit0: of de temperatuurregeling Succesvol is Bit1: Of de temperatuurregeling Succes Succesvol is: of de temperatuurinstelling succesvol is: of de temperatuurbesturingsquery succesvol is: | 22 bytes |
| 3 | 0x04 | Blinde zone -instelling, eenheid M | D1 D0 | Gegevens beschrijven de dichtstbijzijnde afstandswaarde, eenheid 1m; start hoog en eind laag | Six Bytes (drop power Saving) |
| 4 | 0x06 | Cumulatief aantal lichtuitvoerquery's | D3 ~ D0 | Data drukt het aantal lichten uit, 4 bytes, met de hoge byte eerst | Acht bytes |
| 5 | 0x31 | Stel de precieze code in | D4 D3 ~ D0 | D4: Nauwkeurig codenummer, bereik 1 ~ 8d3 ~ d0 vertegenwoordigt de periode, eenheid USRange: 45000 ~ 60000 | Negen bytes |
| 6 | 0x32 | Stel variabele intervalcodes in | D1 D0 | D1 variabele intervalcode nummerbereik 1 ~ 16d0 00 is succesvol ingesteld en 01 is ingesteld mislukt | Zes bytes |
| 7 | 0x33 | Stel een pseudo-willekeurige code in | D1 D0 | D1 pseudo-willekeurige codelummerbereik 1 ~ 2d0 00 is succesvol ingesteld en 01 is ingesteld mislukt | Zes bytes |
| 8 | 0x41 | Nauwkeurige codecyclusquery | D4 D3 ~ D0 | D4: Nauwkeurig codenummer, bereik 1 ~ 8d3 ~ d0 vertegenwoordigt de periode, eenheid USRange: 45000US ~ 60000US | Negen bytes |
| 9 | 0x42 | Variabele intervalcodequery | D33 (Ref.) D32 (aantal coderende bits) D31 ~ D30 (tijdsinterval tussen de laatste bit 0) D29 ~ D28 (tijdsinterval tussen Bit14 Bit15) D27 ~ D26 (tijdsinterval tussen Bit13 Bit14) D25 ~ D24 (tijdsinterval tussen Bit 12 en Bit 13) D23 ~ D22 (tijdsinterval tussen Bit 11 en Bit 12) D21 (tijdsinterval (tijdsinterval (tijdsinterval tussen Bit 11 en Bit 12) D21 ~ D21 D20 (tijdsinterval tussen Bit 12 en Bit 13) Tussen bit 10 en bit 11) d19 ~ d18 (tijdsinterval tussen bit9 en bit10) d17 ~ d16 (tijdsinterval tussen bit8 bit9) d15 ~ d14 (tijdinterval tussen bit 7 en bit 8) d13 ~ d12 (tijdsinterval tussen bit6 bit7) d11 ~ d10 (tijdsinterval tussen bit5 d9 ~ d8 (tijdsinterval tussen bit4 en bit5) d6 (tijdsinterval tussen bit5 d6 (tijdsinterval tussen bit5 (tijdsinterval tussen bit4 en bit5) d6 (tijdsinterval tussen bit5 d6 (tijdsinterval tussen bit5 (tijdsinterval tussen bit4 (tijdsinterval tussen bit4 (tijdsinterval tussen bit4 (tijdsinterval tussen bit4 (tijdsinterval tussen bit4 (tijdsinterval tussen bit4 (tijdsinterval tussen bit4 (tijdsinterval tussen bit5 (tijdsinterval tussen bit5 (tijdsinterval tussen bit5 (tijdsinterval tussen bit5) bit3 bit4) d5 ~ d4 (tijdsinterval tussen bit2 bit3) d3 ~ d2 (tijdsinterval tussen bit1 bit2) d1 ~ d0 (tijdsinterval tussen bit0 bit1) |
|
38 bytes |
| 10 | 0x43 | Pseudo-willekeurige codequery | D4 D3 ~ D0 | D4: Pseudo-willekeurige codecodering, bereik 1 ~ 2d3: lengte van pseudo-willekeurige code, variërend van 2 tot 16d2 d1: initiële waarde van pseudo-willekeurige code, die uit het onderste bit is genomen volgens de lengte van pseudo-random code0: standby, set 0 | Negen bytes |
| 11 | 0x44 | Continue bestraling werktijd instelling | D1 = 00 (H) D0 = jy (H) | YY Continu -bestralingstijd, eenheid S, time -out stopt automatisch | Zes bytes |
| 12 | 0x45 | Continue exposure werktijdquery | D1 = 00 (H) D0 = jy (H) | YY Continu -bestralingstijd, eenheid S, time -out stopt automatisch | Zes bytes |
| 13 | 0x24 | Periodieke bestralingsparameterinstelling | D2 D1 D0 | D2: Aantal werkcyclesd1: werktijd per cyclus, eenheid SD0: rusttijd per cyclus, in s | Zeven bytes |
| 14 | 0x25 | Periodieke bestralingsparameterquery | D2 D1 D0 | D2: Aantal werkcyclesd1: werktijd per cyclus, eenheid SD0: rusttijd per cyclus, in s | Zeven bytes |
| 15 | 0xeb | Uitrustingsnummer Query | D15 ~ D0 | D15 ~ D12: Product ModelD11 D10: Product NumberD9 D8: Software versied7 D6: aanpassen Q Numberd5 D4: Drive Numberd3 D2: Laser Numberd1 D0: FPGA ID | 20 bytes |
| 16 | 0x51 | Debug -modus | D1 D0 | D1: 01 Debuggingsmodus invoeren, 00 Exit Debugging Moded0: Standby | Zes bytes |
| 17 | 0x01 | Single Ranging | D9D8 D7 D6D5 D4 D3D2 D1 D0B4 B3 B2 B2 B1 | D9 (bit7-bit0) vlag byte: d9 is de 7e positie die de hoofdgolf aangeeft; 1: Er is een hoofdgolf, 0: geen hoofdgolf.d9 is de 6e positie die echo aangeeft; 1: Er is echo, 0: geen echod9 De 5e bit geeft de lasersatus aan; 1: Normale laser, 0: laser faultD9 is ongeldig (ingesteld op 0) op de 4e positie; d9 is ongeldig op de 3e positie (ingesteld op 0); d9 De tweede positie geeft de APD -toestand aan; 1: Normaal, 0: Errord9 is de eerste positie die aangeeft of er een eerder doel is; 1: Er is een doelwit, 0: geen doelwit (het doelwit voor het hoofddoel is het vorige doel en het doelwit in het blinde gebied) .d9 De 0e bit geeft aan of er een daaropvolgend doel is; 1: Er is een doel, 0: Er is geen doelwit (het doel na het hoofddoel is de daaropvolgende doel) D8-D6 Eerste doelafstand (eenheid 0,1 m) D5-D3-afstand tot de tweede doel (eenheid 0,1 m) D2-D0 Derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij tot FARB4 en B3 geven aan dat hoge drukwaarden B2 geeft aan dat de aandrijfstroom waardeB1 B0 de temperatuur van de laser aangeeft | 19 bytes |
| 18 | 0x02 | Continu variërend | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) vlag byte: d9 is de 7e positie die de hoofdgolf aangeeft; 1: Er is een hoofdgolf, 0: geen hoofdgolf.d9 is de 6e positie die echo aangeeft; 1: Er is echo, 0: geen echod9 De 5e bit geeft de lasersatus aan; 1: Normale laser, 0: laser faultD9 is ongeldig op de 4e positie (ingesteld op 0); d9 is ongeldig op de 3e positie (ingesteld op 0); d9 De tweede positie geeft de APD -toestand aan; 1: Normaal, 0: Errord9 is de eerste positie om aan te geven of er een eerder doel is; 1: Er is een doel, 0: er is geen doelwit (het doelwit voordat het hoofddoel het vorige doel is en het doelwit in het blinde gebied) .d9 De 0e bit geeft aan of er een daaropvolgend doel is; 1: Er is een doel, 0: Er is geen doelwit (het doel na het hoofddoel is een daaropvolgende doel) D8-D6 Eerste doelafstand (eenheid 0,1 m) D5-D3-afstand tot de tweede doel (eenheid: 0,1 m) D2-D0 Derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij naar FARB4 en B3 geven aan dat de APD Hoge drukwaardeB2 aangeeft dat de aandrijfstroomwaarde B0 B0 de temperatuur van de laser vertegenwoordigt | 19 bytes |
| 19 | 0x30 | schitterend | D9 D8 D7D5 D4 D3D2 D1 D0B4 B3 B2 B1 B0 | D9 (bit7-bit0) vlag byte: d9 is het 7e bit om de hoofdgolf aan te geven; 1: Er is een hoofdgolf, 0: geen hoofdgolf.d9 is de 6e positie die echo aangeeft; 1: Er is echo, 0: geen echod9 De 5e bit geeft de lasersatus aan; 1: Normale laser, 0: laser faultD9 is ongeldig op positie 4 (ingesteld op 0) D9 is ongeldig op de 3e positie (ingesteld op 0); d9 De tweede positie geeft de APD -status aan; 1: Normaal, 0: Errord9 is de eerste positie om aan te geven of er een eerder doel is; 1: Er is een doelwit, 0: geen doelwit (het doelwit voor het hoofddoel is het vorige doel en het doelwit in het blinde gebied) .d9 De 0e bit geeft aan of er een daaropvolgend doel is; 1: Er is een doel, 0: Er is geen doelwit (het doel na het hoofddoel is de daaropvolgende doel) D8-D6 Eerste doelafstand (eenheid 0,1 m) D5-D3-afstand tot de tweede doel (eenheid: 0,1 m) D2-D0 Derde doelafstand (eenheid 0,1 m) 3. Doelen zijn van dichtbij naar FARB4 en B3 geven aan dat de APD Hoge drukwaardeB2 aangeeft dat de aandrijfstroomwaarde B0 B0 de temperatuur van de laser vertegenwoordigt | 19 bytes |
| 20 | 0xec | Een instructiefout | D1 = 00 D0 = 00 | De opdracht camera feedback is onjuist | Zes bytes |
| 21 | 0xee | Effectiviteitsfouten | D1 = 00 D0 = 00 | De feedback van de camera is onjuist | Zes bytes |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| OPMERKING: ① Niet -gedefinieerde gegevens byte/bit, standaard is 0; | |||||
Hottags: 45MJ Laser Target Designator (LTD) WIHT LRF, fabrikanten, leveranciers, fabriek, China, gemaakt in China, op maat gemaakte, hoge kwaliteit
Gerelateerde categorie
905nm laserafstandsmetermodule
1535nm laserafstandsmetermodule
1570nm laserafstandsmetermodule
1.54UM Laser Rangefinder -module
1064nm Laser Target -aanduiding
Anti -drone Stemstemmodule
Variërende Lidar-module
Stuur onderzoek
Stel gerust uw vraag via onderstaand formulier. Wij zullen u binnen 24 uur antwoorden.




 wiHt lrf")